U-Boot串口初始化详解
目录
零、概述
一、init_baudrate
二、serial_init
三、console_init_f
四、devices_init
五、console_init_r
六、打印信息
七、为什么要使用devlist,std_device[]?
零、概述
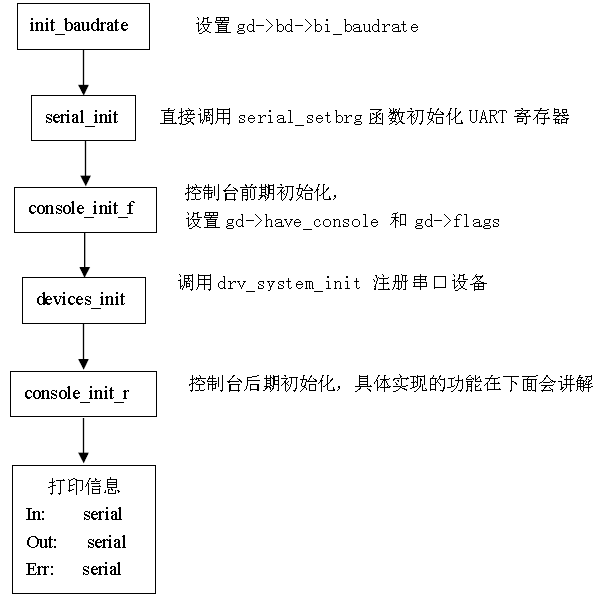
上面这张图是U-Boot中串口设备驱动的流程,从寄存器级别的设置到最后终端信息的输出。下面我们详细讲解每一个步骤。
一、init_baudrate
该函数设置了gd->bd->bi_baudrate。
static int init_baudrate (void)
{
char tmp[64]; /* long enough for environment variables */
int i = getenv_r ("baudrate", tmp, sizeof (tmp));
gd->bd->bi_baudrate = gd->baudrate = (i > 0)
? (int) simple_strtoul (tmp, NULL, 10)
: CONFIG_BAUDRATE;
//#define CONFIG_BAUDRATE 115200 定义在/include/configs/smdk2410.c中
//如果环境中没有保存,则使用宏定义的参数
return (0);
}
二、serial_init
UART控制器的初始化。
void serial_setbrg (void)
{
S3C24X0_UART * const uart = S3C24X0_GetBase_UART(UART_NR);
int i;
unsigned int reg = 0;
/* value is calculated so : (int)(PCLK/16./baudrate) -1 */
reg = get_PCLK() / (16 * gd->baudrate) - 1;
/* FIFO enable, Tx/Rx FIFO clear */
uart->UFCON = 0x07;
uart->UMCON = 0x0;
/* Normal,No parity,1 stop,8 bit */
uart->ULCON = 0x3;
/*
* tx=level,rx=edge,disable timeout int.,enable rx error int.,
* normal,interrupt or polling
*/
uart->UCON = 0x245;
uart->UBRDIV = reg;
#ifdef CONFIG_HWFLOW
uart->UMCON = 0x1; /* RTS up */
#endif
for (i = 0; i < 100; i++);
}
/*
* Initialise the serial port with the given baudrate. The settings
* are always 8 data bits, no parity, 1 stop bit, no start bits.
*
*/
int serial_init (void)
{
serial_setbrg ();//UART寄存器设置
return (0);
}
三、console_init_f
控制台的前期初始化。
int console_init_f (void)
{
gd->have_console = 1;
#ifdef CONFIG_SILENT_CONSOLE
if (getenv("silent") != NULL)
gd->flags |= GD_FLG_SILENT;
#endif
return (0);
}
四、devices_init
这一部分在前面的文章已经分析过了,这里就不在叙述了。
五、console_init_r
控制台后期初始化。查看环境参数stdin,stdout,stderr中对标准IO的指定的设备名称,如果没有知道再按照环境指定的名称搜索devlist,将搜到的设备指针赋给标准IO数组stdio_devices[]。
int console_init_r (void)
{
char *stdinname, *stdoutname, *stderrname;
device_t *inputdev = NULL, *outputdev = NULL, *errdev = NULL;
#ifdef CFG_CONSOLE_ENV_OVERWRITE
int i;
#endif /* CFG_CONSOLE_ENV_OVERWRITE */
/* set default handlers at first 设置跳转表*/
gd->jt[XF_getc] = serial_getc;
gd->jt[XF_tstc] = serial_tstc;
gd->jt[XF_putc] = serial_putc;
gd->jt[XF_puts] = serial_puts;
gd->jt[XF_printf] = serial_printf;
/* stdin stdout and stderr are in environment 查看环境参数stdin,stdout,stderr中对标准IO的指定的设备名称*/
/* scan for it */
stdinname = getenv ("stdin");
stdoutname = getenv ("stdout");
stderrname = getenv ("stderr");
if (OVERWRITE_CONSOLE == 0) { /* if not overwritten by config switch */
inputdev = search_device (DEV_FLAGS_INPUT, stdinname);
outputdev = search_device (DEV_FLAGS_OUTPUT, stdoutname);
errdev = search_device (DEV_FLAGS_OUTPUT, stderrname);
}
/* if the devices are overwritten or not found, use default device 按指定的名称搜索设备*/
if (inputdev == NULL) {
inputdev = search_device (DEV_FLAGS_INPUT, "serial");
}
if (outputdev == NULL) {
outputdev = search_device (DEV_FLAGS_OUTPUT, "serial");
}
if (errdev == NULL) {
errdev = search_device (DEV_FLAGS_OUTPUT, "serial");
}
/* Initializes output console first将搜到的设备指针赋给标准IO数组stdio_devices[],在下面会将为什么要这样做 */
if (outputdev != NULL) {
console_setfile (stdout, outputdev);
}
if (errdev != NULL) {
console_setfile (stderr, errdev);
}
if (inputdev != NULL) {
console_setfile (stdin, inputdev);
}
gd->flags |= GD_FLG_DEVINIT; /* device initialization completed,到此串口设备才初始化完成,这个标志会影响getc等函数 */
#ifndef CFG_CONSOLE_INFO_QUIET
/* Print information 打印信息*/
puts ("In: ");
if (stdio_devices[stdin] == NULL) {
puts ("No input devices available!\n");
} else {
printf ("%s\n", stdio_devices[stdin]->name);
}
puts ("Out: ");
if (stdio_devices[stdout] == NULL) {
puts ("No output devices available!\n");
} else {
printf ("%s\n", stdio_devices[stdout]->name);
}
puts ("Err: ");
if (stdio_devices[stderr] == NULL) {
puts ("No error devices available!\n");
} else {
printf ("%s\n", stdio_devices[stderr]->name);
}
#endif /* CFG_CONSOLE_INFO_QUIET */
#ifdef CFG_CONSOLE_ENV_OVERWRITE
/* set the environment variables (will overwrite previous env settings) */
for (i = 0; i < 3; i++) {
setenv (stdio_names[i], stdio_devices[i]->name);
}
#endif /* CFG_CONSOLE_ENV_OVERWRITE */
#if 0
/* If nothing usable installed, use only the initial console */
if ((stdio_devices[stdin] == NULL) && (stdio_devices[stdout] == NULL))
return (0);
#endif
return (0);
}
六、打印信息
在最后会打印出如下信息:
In: serial
Out: serial
Err: serial
这说明串口初始化完成。
七、为什么要使用devlist,std_device[]?
为了更灵活地实现标准IO重定向,任何可以作为标准IO的设备,如USB键盘,LCD屏,串口等都可以对应一个device_t的结构体变量,只需要实现getc和putc等函数,就能加入到devlist列表中去,也就可以被assign为标准IO设备stdo_device中去。如函数int console_assign (int file, char *devname); /* Assign the console 重定向标准输入输出*/这个函数功能就是把名为devname的设备重定向为标准IO文件file(stdin,stdout,stderr)。其执行过程是在devlist中查找devname的设备,返回这个设备的device_t指针,并把指针值赋给stdo_device[file]。
int console_assign (int file, char *devname)
{
int flag, i;
/* Check for valid file */
switch (file) {
case stdin:
flag = DEV_FLAGS_INPUT;
break;
case stdout:
case stderr:
flag = DEV_FLAGS_OUTPUT;
break;
default:
return -1;
}
/* Check for valid device name */
for (i = 1; i <= ListNumItems (devlist); i++) {
device_t *dev = ListGetPtrToItem (devlist, i);
if (strcmp (devname, dev->name) == 0) {
if (dev->flags & flag)
return console_setfile (file, dev);
return -1;
}
}
return -1;
}
该函数是调用console_setfile设置stdo_device[]完成重定向输入输出。
static int console_setfile (int file, device_t * dev)
{
int error = 0;
if (dev == NULL)
return -1;
switch (file) {
case stdin:
case stdout:
case stderr:
/* Start new device */
if (dev->start) {
error = dev->start ();
/* If it's not started dont use it */
if (error < 0)
break;
}
/* Assign the new device (leaving the existing one started) */
stdio_devices[file] = dev;//这里是关键
/*
* Update monitor functions
* (to use the console stuff by other applications)
*/
switch (file) {
case stdin:
gd->jt[XF_getc] = dev->getc;
gd->jt[XF_tstc] = dev->tstc;
break;
case stdout:
gd->jt[XF_putc] = dev->putc;
gd->jt[XF_puts] = dev->puts;
gd->jt[XF_printf] = printf;
break;
}
break;
default: /* Invalid file ID */
error = -1;
}
return error;
}
分享到:




相关推荐
4.2 常用U‐BOOT命令详解............................................................................................................................... ....... 13 4.2.1获取帮助 ........................
9.8.1 OHCI驱动初始化 9.8.2 与USBD连接 9.8.3 OHCI根HUB 9.9 扫描仪设备驱动程序 9.9.1 USBD接口 9.9.2 文件系统接口 9.10 USB主机驱动在S3C2410X平台的实现 9.10.1 USB主机控制器简介 9.10.2 驱动程序的...
║2 嵌入式系统开发技术详解——基于ARM 3.1 Linux 常用工具.............................................................................................................. 28 3.1.1 Shell简介..................